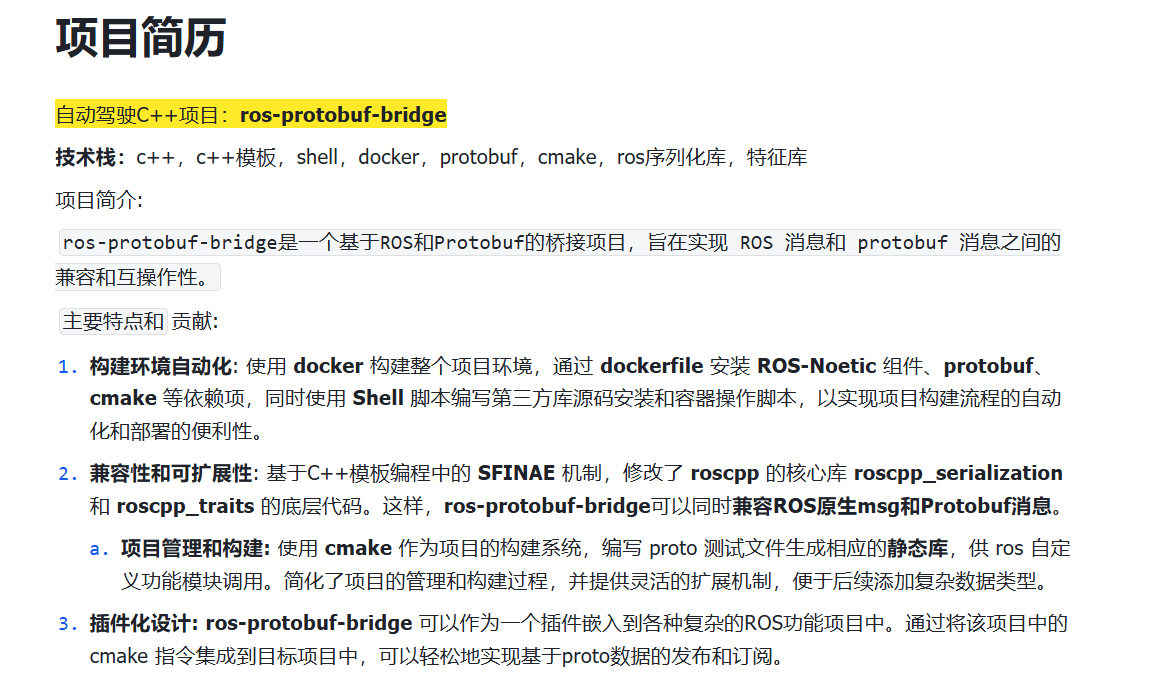
自动驾驶机器人C++项目:ros-protobuf-bridge
项目简介
ros-protobuf-bridge 是一个基于 ROS 和 Protobuf 的桥接项目,旨在实现 ROS 消息和 Protobuf 消息之间的兼容和互操作性。通过该项目,可以深入学习ROS底层源码;可以轻松地在 ROS 系统中使用 Protobuf 定义的数据结构,提升系统的灵活性和扩展性。
适合岗位:自动驾驶开发、机器人开发、ROS开发、C++开发。
注:自动驾驶和机器人C++岗位技术栈是一致的,该项目两个领域都可以投递
B站项目视频介绍
自动驾驶机器人C++项目:魔改ROS-兼容Protobuf和Rosmsg, Docker, CMake, C++元模板, 项目简历, 项目演示
技术栈
- 编程语言:C++、shell
- 核心特性:C++模板编程、SFINAE 机制
- 序列化:Protobuf、ROS 序列化库
- ROS相关技术:roscpp 的底层核心库 roscpp_serialization、roscpp_traits
- 容器化:Docker
- 构建工具:CMake
- 代码管理:Git、clang-format
购买方式
如果您对项目感兴趣,欢迎添加我的微信:auto_drive_yue,获取全套源码视频文档讲解,项目一对一答疑,项目交流群。
目前项目优惠价:160元

项目模块详解
用户评价
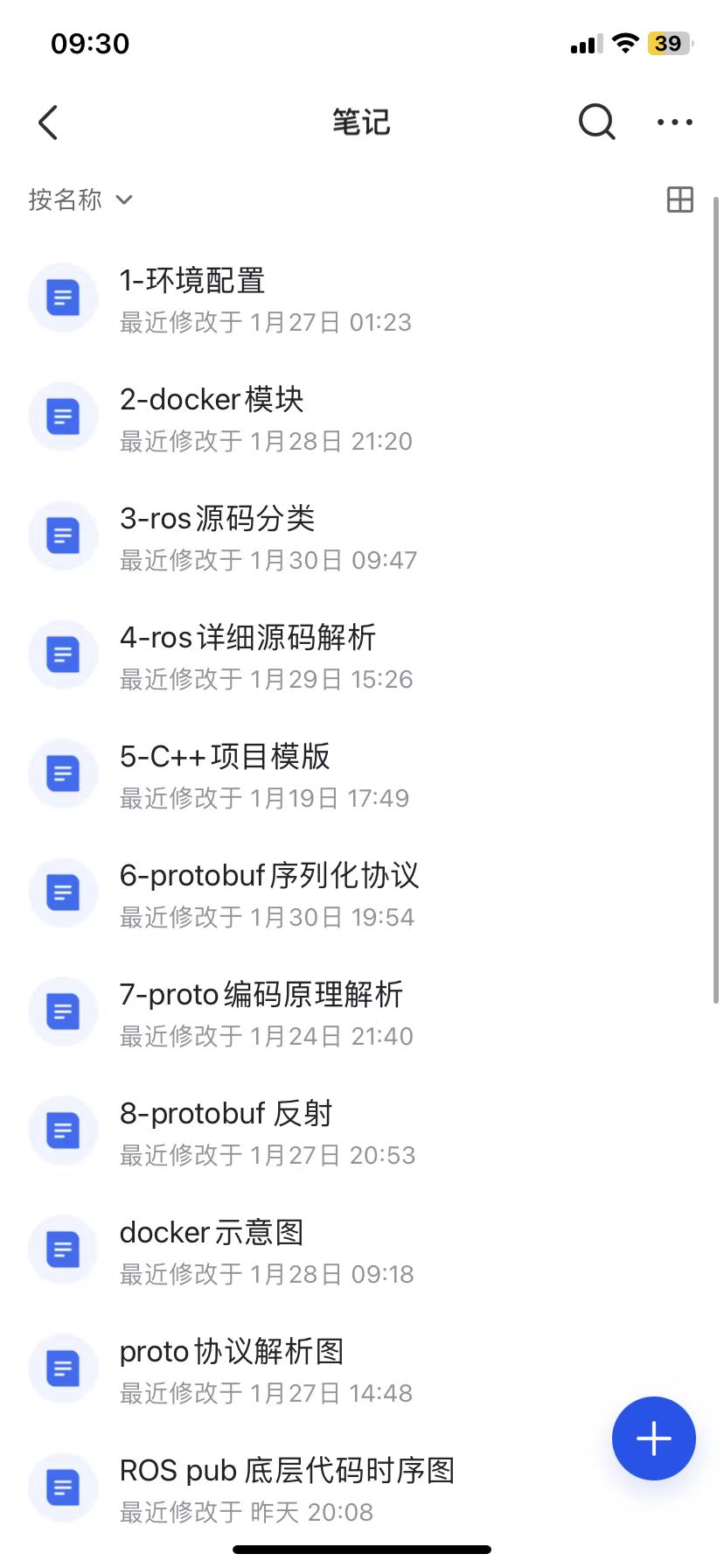
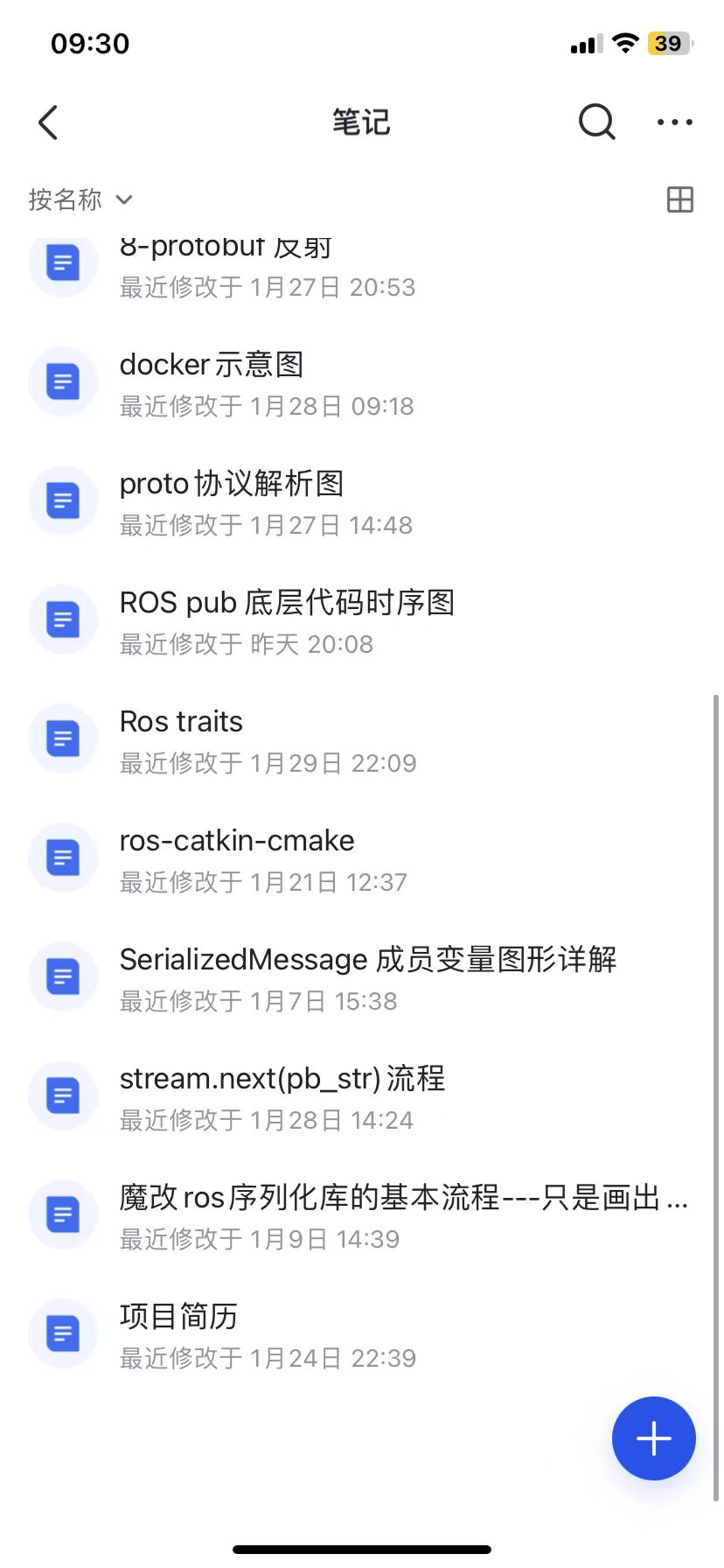
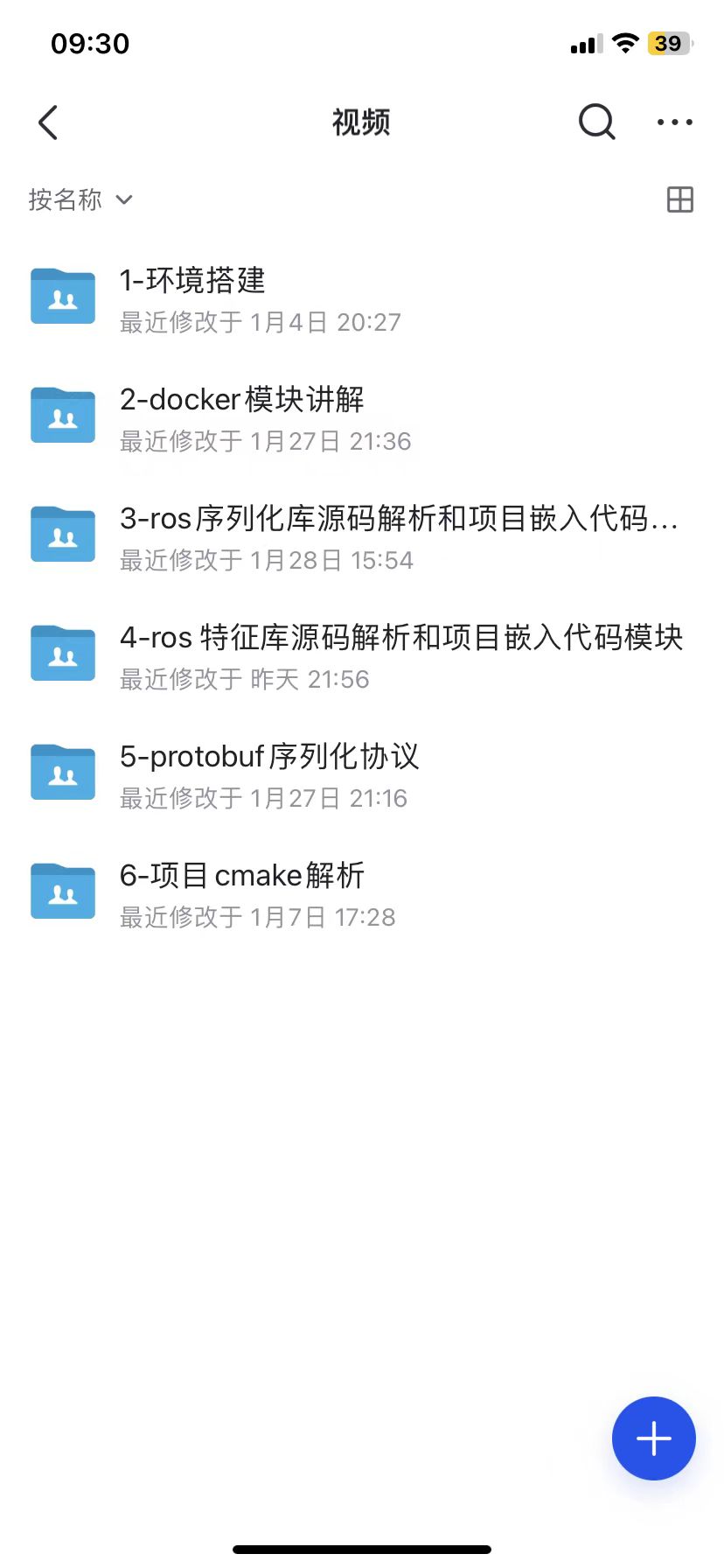
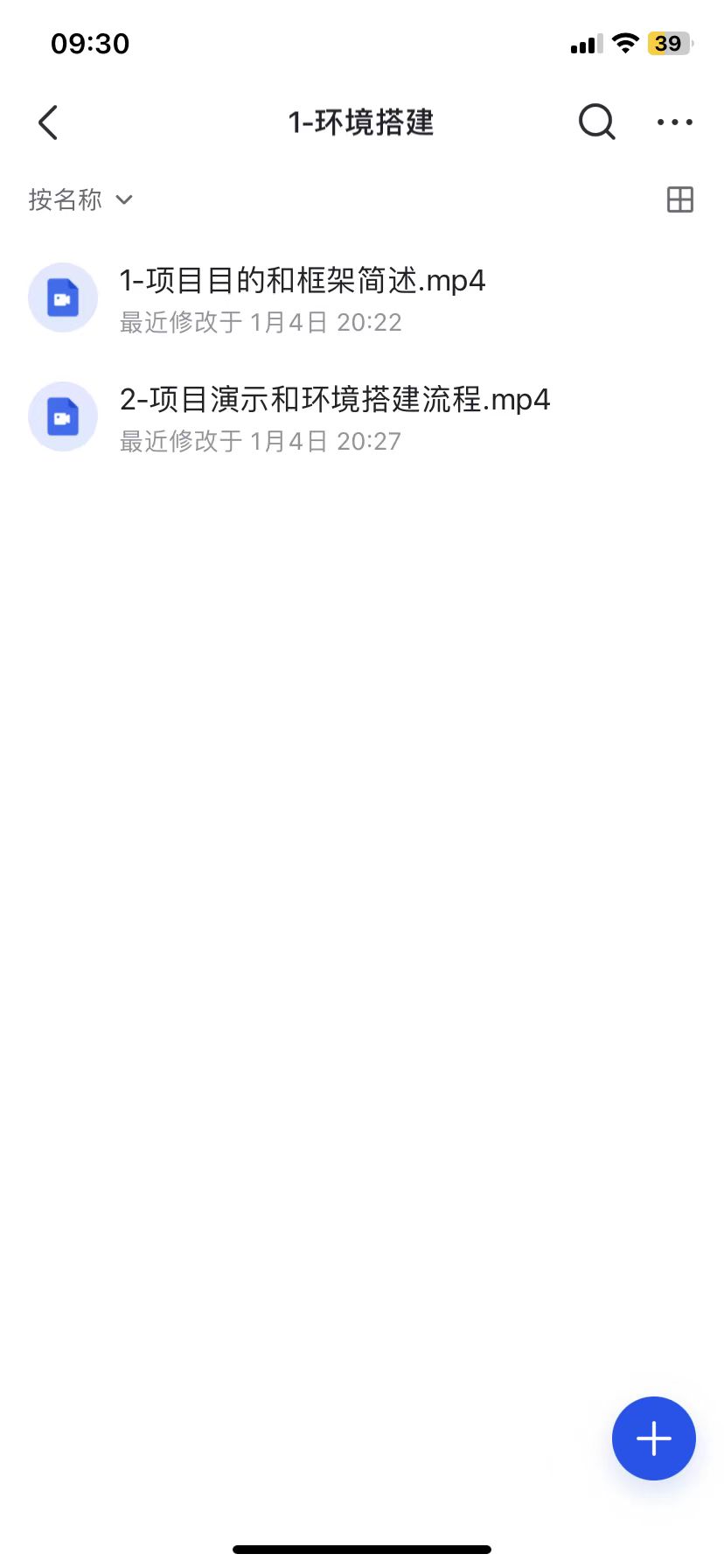
项目视频文档目录





All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.